F. Wagner January 2010
StateWORKS: PID regulator
Introduction
StateWORKS is a system to develop and implement control systems [1]. Closed loop regulators belong also to this category. We do not have an RTDB object that realizes the PID regulation algorithm but we offer an Output Function for this purpose.
The technical note gives a short introduction to this technique and shows the implementation details by an example.
PID Regulation
The Output Function realizes the well known calculation algorithm calculating the regulator output:
Out = Kpe + Ki∫edt + Kdde/dt
where:
- e – the error
- Kp - Proportional gain
- Ki – Integral gain
- Kd - Derivative gain
- In a discrete implementation the following formula will be used:
- Out = Kpe + KiΣe + Kd(elast – e)
It is assumed that the calculations are done using a constant time interval, in other words a fixed sampling rate.
OfuRegulator
The actual calculation done by the OfuRegulator function corresponds to previous formulas. The function accesses several RTDB objects, among others:
- Inputs
- ActValue – the regulated value
- SetValue – the required value
- Output
- OutValue – regulator output value
- Parameters
- Kp – Proportional gain
- Ki – Integral gain
- Kd – Differential gain
- SamplingTime – the sampling value used in the autonomous mode
- Intermediate values
- Error - the error value
- Integral – the integral value
The function has two modes: Autonomous and Sampling. In the Autonomous mode the function samples the input values and calculates the output according to its internal clock defined by a parameter SamplingTime.
In the Sampling mode the calling state machine is responsible for the sampling period. Normally, it uses a timer generated clock or just changes of the input ActValue which equals the polling rate of the I/O Handler.
An application can specify any number of OFUN Objects which provide access to the OfuRegulator function. So, the application can have any number of PID regulators, each with its own set of required objects (input, outputs, intermediate values and parameters).
Example
The implementation of the PID algorithm has been tested using a state machine shown Figure 1.
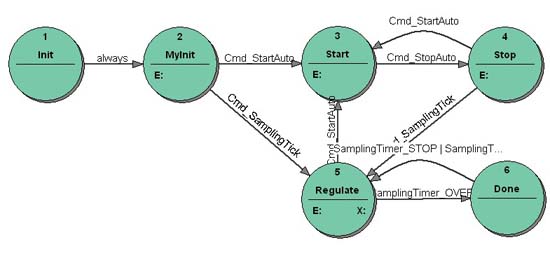
Figure 1: PID Test: State transition diagram
The object has been simulated by a delay of 2 sec. Figure 2 and Figure 3 at the end show two curves illustrating changes of the controlled ActValue by different PID parameters. There were no significant differences between Autonomous and Sampling Mode.
Conclusions
The OfuRegulator is an integral part of the StateWORKS versions Basic and Pro. As a standard solution we offer a OfuRegulator function with the Sampling mode. On request we can supply the OfuRegulator with the Autonomous mode.
The availability of this PID function means that StateWORKS covers a complete range of control tasks.
References
[1] Wagner, F. et al., Modeling Software with Finite State Machines – A Practical Approach, Auerbach Publications, New York, 2006.
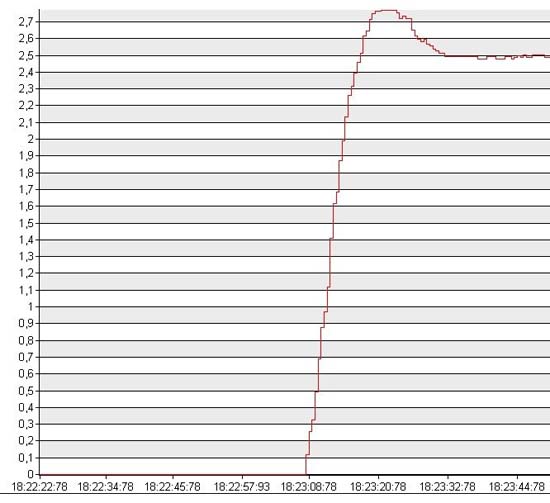
Figure 2: Act Value changes: Example1
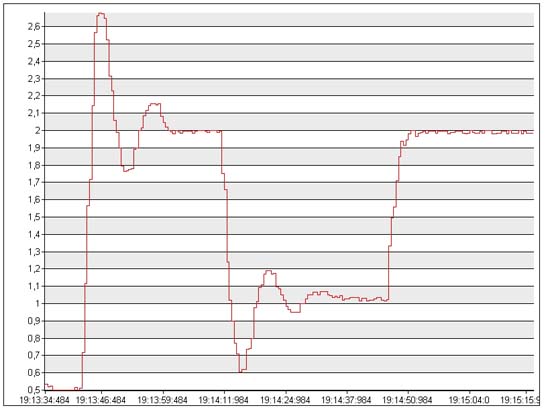
Figure 3: Act Value changes: Example2
 download PDF version
download PDF version